Como funcionam as aulas na MontaMática?
O desenvolvimento da MontaMática teve como princípio a montagem e programação de um modelo de robô móvel que pudesse se movimentar sobre um plano. Desta forma, seria possível adaptar diferentes atividades matemáticas com o uso da ferramenta, atingindo o objetivo de simular situações da matemática a serem observadas através de outra ótica pelos alunos. Para que essa ideia se tornasse realidade, foram adaptados dois modelos de montagem e programação entre os disponibilizados por Parker (2007), que proporcionam a criação de um veículo movimentado através de comandos de voz e também de um medidor de distâncias baseado no princípio de um hodômetro. Através da adaptação destes modelos, foi possível definir que a MontaMática abrangeria duas atividades dinâmicas, e que ambas trabalhariam as propriedades de um triângulo retângulo. Na primeira, o robô seria capaz de calcular distâncias através da locomoção sobre uma reta, podendo calcular área e perímetro. A locomoção é realizada através do manuseio do robô, movendo a roda sobre a reta a ser calculada. Na segunda dinâmica, o modelo montado se assemelharia a um veículo e contaria com um sensor de voz, que teria como tarefa a locomoção do robô através de comandos de voz em inglês.
A decisão em trabalhar com duas dinâmicas diferentes tratando de um assunto em comum foi realizada com o objetivo de fornecer uma alternativa aos alunos. Caso um aluno não tenha entendido ou se interessado pelo funcionamento de um dos robôs, a possibilidade de entendimento da atividade e proposta, caso exista uma alternativa, é maior. Levando em conta as motivações deste trabalho em aplicar a dinâmica para alunos do Ensino Fundamental, foi possível definir o número de alunos participantes da aula, visto que as turmas do Ensino Fundamental são formadas por um número médio de quarenta alunos. A partir desta definição, as atividades foram decididas, assim como a maneira em que aconteceriam durante a aula dinâmica.
O robô proposto para a primeira dinâmica tem como objetivo o cálculo de distâncias através da rotação de uma roda acoplada a um motor. A rotação é realizada manualmente, ou seja, o aluno deve manusear o robô e deslizar a roda sobre a superfície desejada para realizar o cálculo. Além do cálculo da distância, o robô tem como tarefas o cálculo do perímetro e área de um triângulo retângulo. Abaixo, o robô é ilustrado em cima de uma mesa demarcada por um triângulo de área a ser calculada, os alunos devem usar as funcionalidades do robô para calcular as propriedades de um certo triângulo demarcado. Além dessas propriedades, o robô também foi pensado como instrumento de prova real no cálculo do Teorema de Pitágoras, calculando a distância do lado desconhecido de um triângulo apenas pela movimentação da roda sobre a hipotenusa.
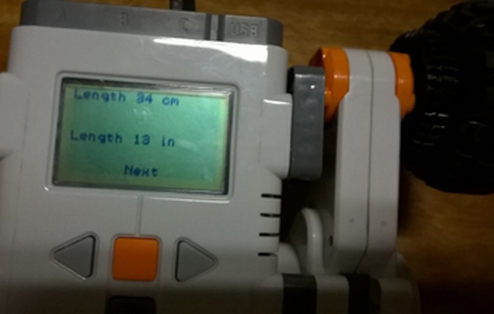
A interação das crianças e adolescentes com o robô deve ser facilitada através da tela do brick, que exibe todas as informações das distâncias percorridas, assim como os cálculos realizados. Através dos botões de navegação do módulo programável, é possível interagir com o programa desenvolvido, dando continuidade à medição ou partindo para o cálculo desejado com os valores obtidos. Essa interação e resposta do módulo para o usuário pode ser observada na figura abaixo, onde é exibida a distância que o aparelho acabara de percorrer. A partir do momento em que a roda começa a se movimentar, a distância é calculada até o momento em que ela desacelera completamente, entendendo como um novo cálculo caso a roda volte a se movimentar depois de parada.
A segunda dinâmica utiliza do modelo de movimentação por comandos de voz e é tratada como uma sequência direta da primeira atividade. Infelizmente, devido a algumas limitações do produto, o reconhecimento de voz não possui suporte ao português. Sendo assim, os comandos de voz utilizados para a movimentação do veículo foram programados para atender ao suporte da língua inglesa. Os comandos “Go”, “Stop”, “Turn Left” e “Turn Right” são responsáveis pela movimentação, frenagem, conversão à esquerda e conversão à direita do veículo. Essa limitação pode influenciar diretamente o resultado da dinâmica, visto que os alunos do Ensino Fundamental, em sua grande maioria, ainda estão iniciando os primeiros contatos com a língua estrangeira. Por outro lado, a limitação pode proporcionar uma situação em que, não apenas a matemática se torne mais atrativa, mas também a língua inglesa.
Utilizando de algumas estratégias do PBL, a dinâmica apresenta para as crianças e adolescentes o desafio de movimentar o robô sobre um retângulo, forçando o trabalho em grupo a encontrar uma solução em que um retângulo pode ser formulado através de dois triângulos retângulos equivalentes. Após o debate para a solução, os comandos necessários para a movimentação do robô são apresentados e os alunos passam a utilizar dos comandos para solucionar o problema. No exercício proposto, a movimentação do robô é similar ao apresentado pelo Logo (2000), no qual o veículo se move sempre em frente e pode realizar giros de 90º.
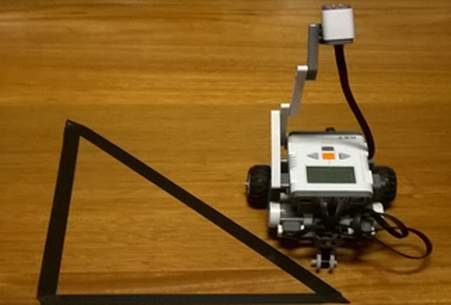
O robô montado para a dinâmica conta com uma estrutura de apoio para o brick que possibilita o acoplamento de dois motores, conectados a duas rodas. A parte de movimentação do robô ainda conta com uma roda dianteira desprovida de tração, interligada através das peças montáveis da estrutura de apoio, servindo apenas de suporte para a estabilidade do robô. O robô montado para a segunda dinâmica e o plano demarcado são exibidos na figura abaixo.
O setor mais importante do veículo é localizado acima de todas as peças do robô, onde o sensor de som é acoplado a uma estrutura intermediária que o mantém interligado à estrutura central de suporte ao brick, no qual todos os componentes eletrônicos, como motores e sensor, são acoplados através do cabeamento. A estrutura montada para dar suporte ao sensor de som é exibida em detalhes na figura abaixo.

Para exemplificar a utilização do PC, é possível afirmar que o Sensor de Som é responsável pela entrada dos dados (direções em que o robô deve seguir) que são direcionados ao módulo programável, que por sua vez, tem como função o processamento dos dados de entrada, apresentando o retorno das respostas para os motores, que finalizam o processo movimentando o robô através das rodas.
O processo de entrada dos dados é realizado por meio do entendimento das ondas sonoras. Caso o modelo de ondas sonoras faladas seja compatível ao modelo programado, a função de um determinado comando é realizada. Este processo pode ser observado na figura abaixo, onde a percepção das ondas sonoras captadas de assemelham às relacionadas ao comando “Turn Right”, que tem como objetivo o giro de 90º do robô para a direita.

A realização da aula prevista pela MontaMática utiliza da projeção de slides com o conteúdo a ser trabalhado, apresentando os índices negativos da matemática no Ensino Fundamental e propondo a interação dos alunos para entender este cenário. Seguindo a aula como um roteiro, a apresentação também introduz a discussão da tecnologia na sala de aula, e propõe soluções por meio de ferramentas como o LEGO Mindstorms. Uma vez que os alunos estão familiarizados com o kit robótico, alguns exercícios de matemática são propostos para a realização sem auxílio da tecnologia, da maneira em que estão acostumados, conforme exibido na figura abaixo.

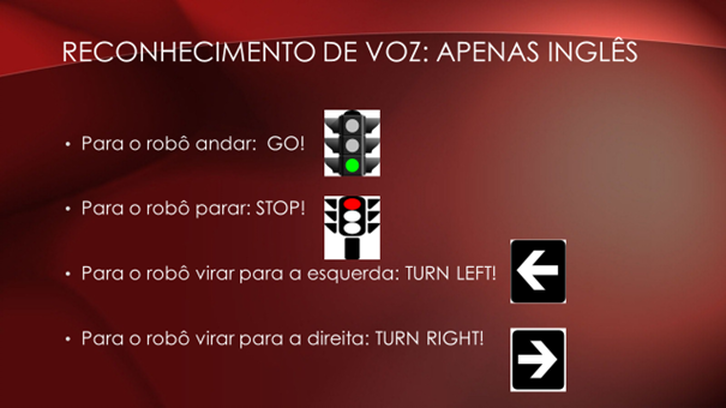
Finalmente, a aula propõe a divisão da turma em quatro grupos de seis a dez alunos, para que as atividades a serem realizadas nas dinâmicas possam começar. Enquanto as dinâmicas acontecem, a projeção de slides segue apresentando as informações necessárias para a interação com os robôs. A figura abaixo exibe o slide de instruções para a movimentação do robô na segunda dinâmica da MontaMática.
A última etapa prevista na aula envolve a distribuição de um questionário simples, no qual os principais agentes no ensino (os próprios alunos) possam avaliar o uso de ferramentas como a robótica no ensino da matemática. O questionário utilizado pode ser encontrado no Apêndice ao final deste trabalho.
Através das atividades lúdicas de interação das crianças com os robôs em função de atividades matemáticas, a MontaMática espera conquistar o interesse e participação dos alunos na resolução dos exercícios. Desta forma, se espera alcançar os melhores resultados no ensino previstos pelo construcionismo, uma vez que a inserção da tecnologia nas tarefas escolares é dada como um agente necessário na mudança do cenário atual da educação, principalmente quando analisada a situação da matemática no Ensino Fundamental brasileiro (SAEB, 2015).